Este año se cumplen 25 años del estreno de Blade Runner, motivo por el que la Warner había anunciado su reedición en DVD, y si los detalles que se han filtrado de Blade Runner: The Ultimate Collection son ciertos la espera habrá merecido la pena:
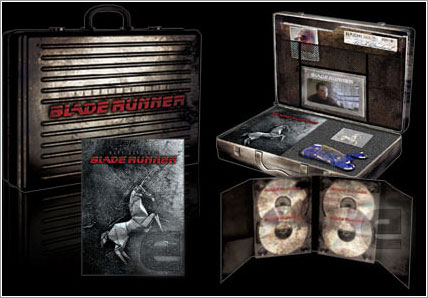
Se trataría de una edición de cinco discos en un maletín metálico que contendrían:
- The Final Cut, que sería la versión definitiva de la película, creada y aprobada por Ridley Scott.
- Tres versiones de la película:
- La versión para cines de Estados Unidos de 1982
- La versión internacional para cines de 1982
- El Director's Cut de 1992
- El nuevo documental Dangerous Days: Making Blade Runner, con entrevistas con los protagonistas y el equipo de la película, críticos y colegas. Este documental echa un vistazo a fondo al origen literario de Blade Runner, su difícil producción y su legado.
- Contenido extra (a confirmar) con pequeñas piezas sobre Philip K. Dick y sobre las distintas fases de producción de la película.
- La versión de trabajo, proyectada sólo en preestrenos y ocasionalmente en festivales de cine; probablemente este disco incluirá también un documental de Channel Four de 52 minutos sobre la película que fue el primero creado sobre la película.

Comentarios